机器人动作强化学习 mjLab 仿真部署
本文提供了一套从视频流提取动作序列、基于该动作序列进行强化学习并利用 MuJoCo 仿真的流程。
环境安装
GVHMR
GVHMR 是浙江大学开源的一个从单目 RGB 视频中恢复全局人体运动的算法。其可以生成一个 pt 文件,记录了从视频中提取的权重文件,包含了对视频进行解算后得到的三维运动特征结果集。
首先从 GitHub 下载 GVHMR 本体:
git clone https://github.com/zju3dv/GVHMR.git
之后按照其 安装教程 安装。
安装完成后,激活 Conda 环境,在 GVHMR/运行:
python tools/demo/demo.py --video=docs/example_video/tennis.mp4 -s
若报错,考虑以下原因:
PyTorch 版本与本机 CUDA 不匹配
需要卸载 PyTorch/TorchVision,然后重新安装:
pip uninstall torch torchvision
pip3 install torch torchvision --index-url https://download.pytorch.org/whl/cu130 # 根据自己的机器情况选择
缺少 chumpy/PyTorch3D
通过以下命令安装:
pip install chumpy --no-build-isolation
pip install "git+https://github.com/facebookresearch/pytorch3d.git" --no-build-isolation
报错 UnpicklingError
其提示:
Weights only load failed. This file can still be loaded, to do so you have two options, do those steps only if you trust the source of the checkpoint.
在 tools/demo/demo.py 开头添加以下代码:
import functools
torch.load = functools.partial(torch.load, weights_only=False)
报错找不到 CUDA:
添加 CUDA 安装路径到 LD_LIBRARY_PATH:
export LD_LIBRARY_PATH=/home/hep/miniconda3/envs/gvhmr/lib/python3.10/site-packages/nvidia/cu13/lib:$LD_LIBRARY_PATH
报错找不到 ffmpeg
通过 apt 安装 ffmpeg:
sudo apt install ffmpeg
提示找不到 SMPL_NEUTRAL.pkl
更改 GVHMR/inputs/checkpoints/body_models/smpl 中的模型分别为:
SMPL_FEMALE.pklSMPL_MALE.pklSMPL_NEUTRAL.pkl
其在文件命名中有所体现。如:
l,f,neutral。
其他错误
考虑 inputs/ 文件夹中的插件是否安装完整:
inputs/checkpoints/
├── body_models/smplx/
│ └── SMPLX_{GENDER}.npz # SMPLX (We predict SMPLX params + evaluation)
└── body_models/smpl/
└── SMPL_{GENDER}.pkl # SMPL (rendering and evaluation)
inputs/checkpoints/
├── dpvo/
│ └── dpvo.pth
├── gvhmr/
│ └── gvhmr_siga24_release.ckpt
├── hmr2/
│ └── epoch=10-step=25000.ckpt
├── vitpose/
│ └── vitpose-h-multi-coco.pth
└── yolo/
GMR
GMR 用于将人类的动作实时、高质量地同步(重定向)到各种不同的类人机器人上。其可以将 GVHMR 生成的 .pt 文件转化为绑定在特定机器人(如 Unitree-G1)上的关节空间轨迹数据。
首先从 GitHub 上落取仓库:
git clone https://github.com/YanjieZe/GMR.git
然后依照 官方教程 安装。
安装后需要在 assets/body_models/smplx 中粘贴前一步骤下载的 SMPLX 的三个 .pkl 文件:
SMPLX_NEUTRAL.pklSMPLX_FEMALE.pklSMPLX_MALE.pkl
Unitree_rl_mjlab
mjlab 是新型的开源机器人强化学习(RL)框架。其结合了 MuJoCo Warp(MuJoCo 的 GPU 加速版本),借鉴了 IsaacLab 的 Manager-based API,且足够轻量。其内部集成了一个官方维护的 BeyondMimic 的复现版本(Reproduction)。
BeyondMimic 是一个由 UC Berkeley 发布的通用类人机器人控制框架,是目前类人机器人领域最前沿的动作模仿与生成框架之一。
Unitree 公司对 mjlab 进行了改进适配。
此部分安装参见 另一篇文章。
工作流程
本文以 GVHMR 示例视频为例,展示整个工作流程。
从视频流生成三维运动特征
进入 GVHMR 文件夹,并激活 gvhmr 环境。
运行以下命令,对 docs/example_video/tennis.mps 进行三维运动特征提取:
python tools/demo/demo.py --video=docs/example_video/tennis.mp4 -s
其中 demo.py 为示例提供的训练脚本,tennis.mp 为训练视频源。运行完毕并没有错误后,其会在 outputs/demo/tennis 中生成结果(该路径会在日志中提示):
- hmr4d_results.pt
- *.mp4
其中的 pt 文件就是生成的三维运动特征文件,体现为 PyTorch 权重。一系列 mp4 文件显示了原视频以及提取的三维特征示意:
将三维运动特征权重文件绑定实体
这一部根据根据不同的机器人模型,生成关节空间轨迹数据。
进入 GMR 文件夹,并激活 gmr 环境。
运行以下命令,从 GVHMR 提取的三维人体运动特征映射到 Unitree G1 的物理关节上,生成对应的 pkl 文件。
python scripts/gvhmr_to_robot.py --gvhmr_pred_file <path_to_hmr4d_results.pt> --robot unitree_g1 --record_video --save_path motions/G1/G1.pkl
必须提供
--save_path参数,以声明生成文件的保存位置。
然后,将该 pkl 文件转化为 csv 文件,用于 mjlab 读取:
python scripts/batch_gmr_pkl_to_csv.py --folder motions/G1/
以上步骤的完成建立在 SMPLX 正确放置的前提下。
利用 mjlab 进行强化学习
进入 unitree_rl_mjlab 文件夹,激活 unitree_rl_mjlab 环境。
运行以下命令将上一步生成的 csv 文件转化为 npz 文件:
python scripts/csv_to_npz.py --input-file src/assets/motions/g1/G1.csv --output-name G1.npz --input-fps 30 --output-fps 50
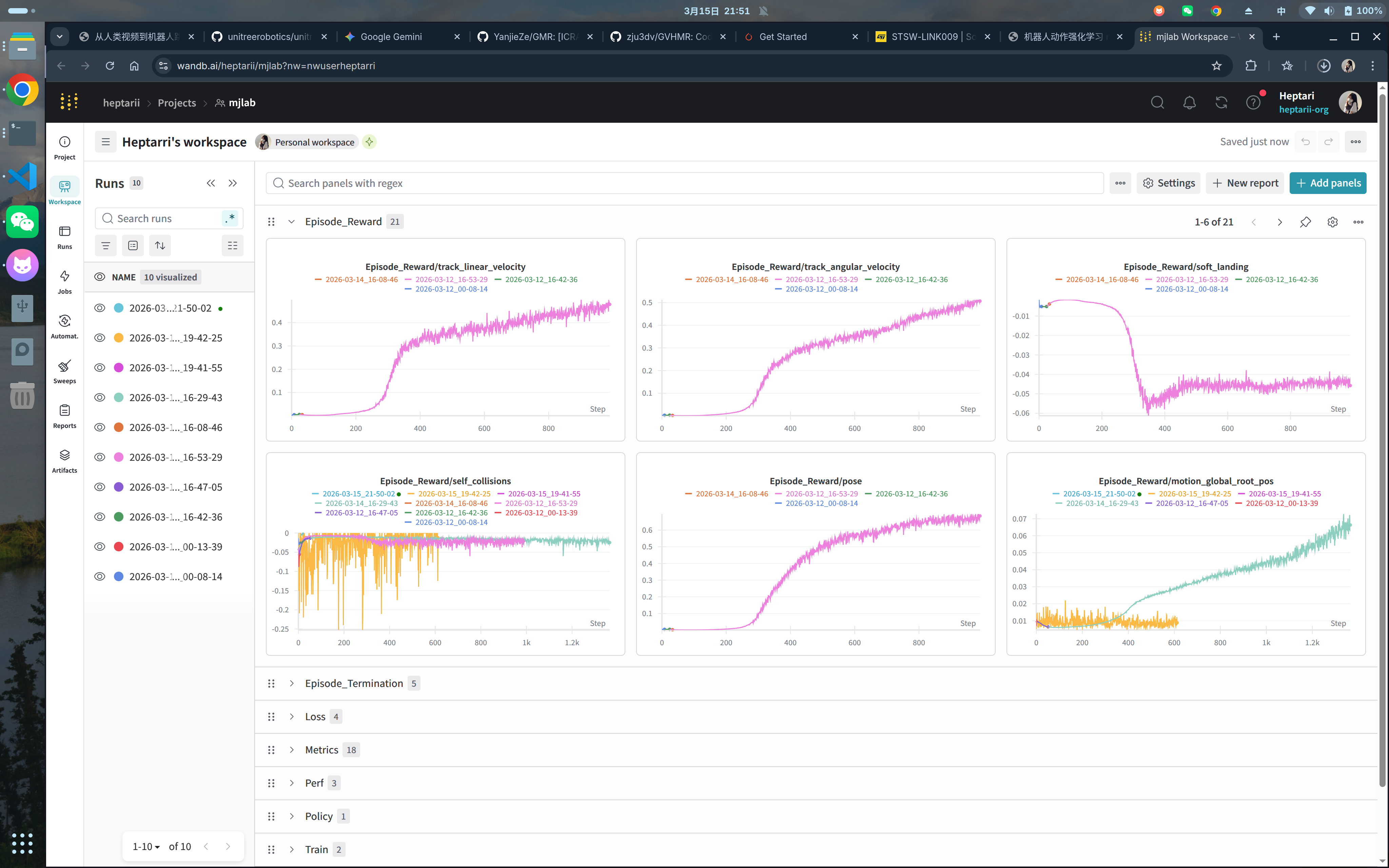
然后运行以下命令进行训练:
python scripts/train.py Unitree-G1-Tracking --motion_file=src/assets/motions/g1/G1.npz --env.scene.num-envs=4096
其会要求注册并填写 wandb 的 API,这是用于远程监控训练进度:
训练进度如果较慢,可以适当降低
--env.scene.num-envs的值,但是效果可能会相应受影响。
在训练完成后,其会在 logs/rsl_rl/g1_tracking/2026-xx-xx_xx-xx-xx/ 中生成相应文件:
model_0.pt初始化的随机模型model_500.pt训练到 500 次迭代的快照model_*.pt最新迭代的快照policy.onnx包含从观测输入(Observations)到动作输出(Actions)的计算图,是纯策略网络模型,作为训练结果2026-xx-xx_xx-xx-xx.onnx带有时间戳的备份文件- …
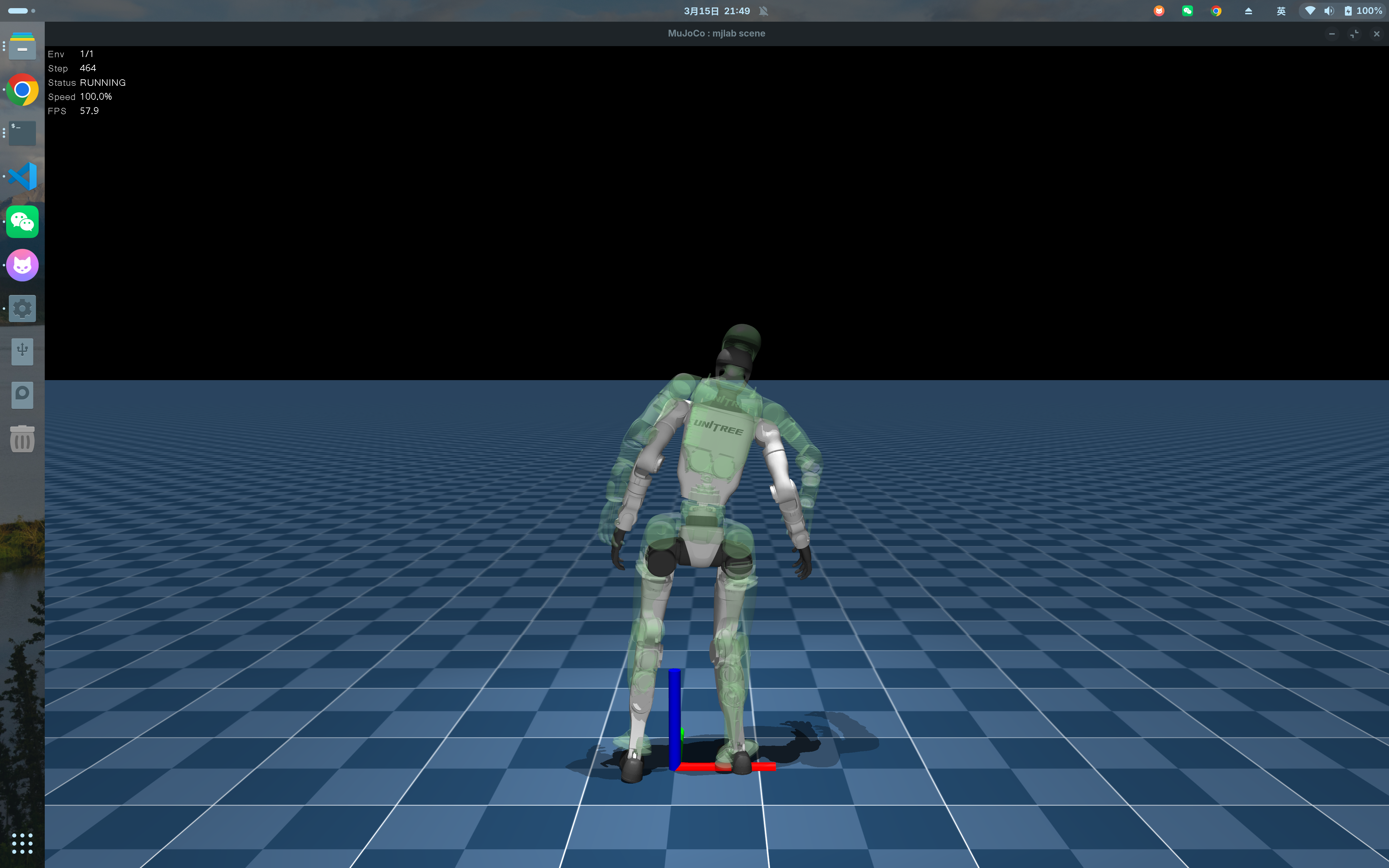
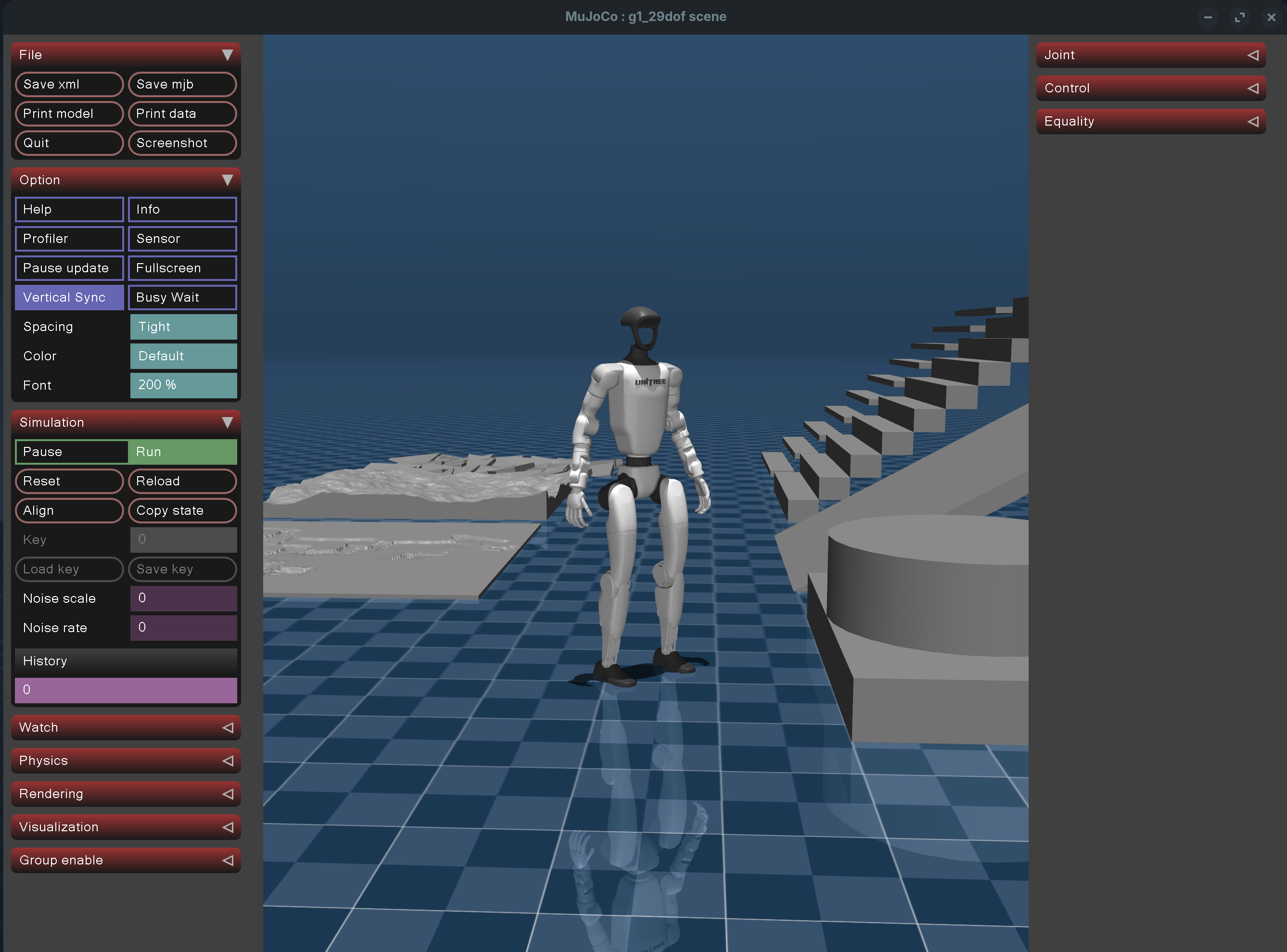
运行以下命令,使用 MuJoCo 展示训练效果:
python scripts/play.py Unitree-G1-Tracking --motion_file=src/assets/motions/g1/dance1_subject2.npz --checkpoint_file=logs/rsl_rl/g1_tracking/2026-xx-xx_xx-xx-xx/model_xx.pt